အနှစ်သာရအားဖြင့်၊ စက်ကိရိယာသည် လူများစက်ကိရိယာကို မတီထွင်မချင်း လူသားကိရိယာများကဲ့သို့ တိုက်ရိုက်၊ လက်စွဲလမ်းညွှန်မှုဖြင့်မဟုတ်ဘဲ၊ စက်ကိရိယာလမ်းကြောင်းကို လမ်းညွှန်ရန် စက်အတွက် ကိရိယာတစ်ခုဖြစ်သည်။
ဂဏန်းထိန်းချုပ်မှု (NC) သည် စက်ကိရိယာများကို အလိုအလျောက် ထိန်းချုပ်ရန်အတွက် ပရိုဂရမ်မာဂျစ် (ဒေတာ၊ နံပါတ်များ၊ သင်္ကေတများ၊ စကားလုံးများ သို့မဟုတ် ပေါင်းစပ်မှုပုံစံ) ကို အသုံးပြုခြင်းကို ရည်ညွှန်းသည်။ ၎င်းမပေါ်မီ၊ လုပ်ဆောင်ခြင်းကိရိယာများကို လက်စွဲအော်ပရေတာများက အမြဲတမ်း ထိန်းချုပ်ထားသည်။
Computer numerical control (CNC) သည် တိကျမှုနှင့် လိုက်လျောညီထွေ တိုးတက်စေရန်အတွက် machining tool control system ရှိ microprocessor သို့ တိကျစွာ ကုဒ်လုပ်ထားသော ညွှန်ကြားချက်များ ပေးပို့ခြင်းကို ရည်ညွှန်းပါသည်။ ယနေ့ခေတ်တွင် လူအများပြောနေကြသော CNC သည် ကွန်ပျူတာများနှင့် ချိတ်ဆက်ထားသော ကြိတ်စက်များကို ရည်ညွှန်းသည်။ နည်းပညာအရပြောရလျှင် ၎င်းကို ကွန်ပျူတာဖြင့် ထိန်းချုပ်ထားသည့် မည်သည့်စက်ကိုမဆို ဖော်ပြရန် အသုံးပြုနိုင်သည်။
လွန်ခဲ့သောရာစုနှစ်များတွင်၊ များစွာသောတီထွင်မှုများသည် CNC စက်ကိရိယာများဖွံ့ဖြိုးတိုးတက်မှုအတွက်အုတ်မြစ်ချခဲ့သည်။ ဤတွင်၊ ကျွန်ုပ်တို့သည် ဂဏန်းထိန်းချုပ်မှုနည်းပညာဖွံ့ဖြိုးတိုးတက်မှု၏ အခြေခံအချက်လေးချက်ကို ကြည့်ပါ- အစောပိုင်းစက်ကိရိယာများ၊ ဖောက်ပြားကတ်များ၊ ဆာဗိုယန္တရားများနှင့် အလိုအလျောက်ပရိုဂရမ်းမင်းကိရိယာများ (APT) ပရိုဂရမ်းမင်းဘာသာစကားကို လေ့လာကြည့်ပါ။
အစောပိုင်းစက်ကိရိယာများ
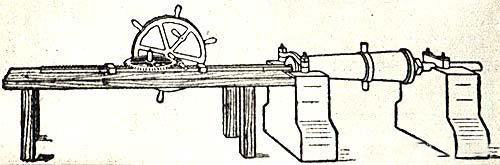
ဗြိတိန်တွင် ဒုတိယစက်မှုတော်လှန်ရေးအတွင်း James Watt သည် စက်မှုတော်လှန်ရေးကို စွမ်းအားပေးသည့် ရေနွေးငွေ့အင်ဂျင်ကို ဖန်တီးခဲ့ခြင်းအတွက် ချီးကျူးခံခဲ့ရသော်လည်း 1775 ခုနှစ်အထိ ရေနွေးငွေ့အင်ဂျင်ဆလင်ဒါများကို တိကျသေချာစွာထုတ်လုပ်ရာတွင် အခက်အခဲများနှင့် ရင်ဆိုင်ခဲ့ရပြီး John Johnwilkinson သည် ကမ္ဘာ့ပထမဆုံးစက်ကိရိယာဟု လူသိများသည့်အရာကို ဖန်တီးခဲ့သည်။ ငြီးငွေ့ဖွယ် ရေနွေးငွေ့အင်ဂျင် ဆလင်ဒါများနှင့် ဖြေရှင်းခဲ့သည်။ ဒီငြီးငွေ့စရာကောင်းတဲ့စက်ကို Wilkinson က သူ့ရဲ့မူလအမြောက်ကို အခြေခံပြီး ဒီဇိုင်းထုတ်ထားပါတယ်။
ဖဲချပ်
1725 တွင် ပြင်သစ်အထည်အလိပ်လုပ်သားတစ်ဦးဖြစ်သော Basile bouchon သည် အပေါက်များမှတစ်ဆင့် စက္ကူတိပ်များပေါ်တွင် ကုဒ်ဝှက်ထားသောဒေတာကို အသုံးပြု၍ အထည်များကို ထိန်းချုပ်သည့်နည်းလမ်းကို တီထွင်ခဲ့သည်။ ၎င်းသည် ဆန်းကြယ်သော်လည်း၊ ဤနည်းလမ်း၏ အားနည်းချက်မှာလည်း သိသာထင်ရှားသည်၊ ဆိုလိုသည်မှာ၊ ၎င်းသည် အော်ပရေတာများ လိုအပ်နေသေးသည်။ 1805 ခုနှစ်တွင် Joseph Marie jacquard သည် ဤအယူအဆကို လက်ခံကျင့်သုံးခဲ့သော်လည်း လုပ်ငန်းစဉ်ကို အလိုအလျောက်လုပ်ဆောင်ခြင်းဖြင့် ပိုမိုအားကောင်းသည့် အပေါက်ဖောက်ကတ်များကို အသုံးပြုခြင်းဖြင့် ခိုင်မာပြီး ရိုးရှင်းပါသည်။ ဤအပေါက်ဖောက်ကတ်များကို ခေတ်မီကွန်ပြူတာ၏အခြေခံအဖြစ် ကျယ်ပြန့်စွာယူဆကြပြီး အိမ်တွင်းလက်မှုလုပ်ငန်းနယ်ပယ်၏ နိဂုံးချုပ်ခြင်းအထိမ်းအမှတ်ဖြစ်သည်။
စိတ်ဝင်စားစရာမှာ၊ ဤအလိုအလျောက်စက်ဖြင့် ၎င်းတို့၏အလုပ်အကိုင်နှင့် အသက်မွေးဝမ်းကျောင်းလုပ်ငန်းများကို ဆုံးရှုံးမည်ကို စိုးရိမ်သော ထိုအချိန်က ပိုးထည်ရက်ကန်းသမားများက Jacquard အထည်များကို ဆန့်ကျင်ခဲ့ကြသည်။ ထုတ်လုပ်သည့် အထည်များကို ကြိမ်ဖန်များစွာ မီးရှို့ကြသည်။ သို့သော်လည်း စက်မှုလုပ်ငန်းမှ အလိုအလျောက် စက်ယန္တရား၏ အားသာချက်များကို အသိအမှတ်ပြုသောကြောင့် ၎င်းတို့၏ ခံနိုင်ရည်သည် အချည်းနှီးဖြစ်ကြောင်း သက်သေပြခဲ့သည်။ 1812 ခုနှစ်တွင် ပြင်သစ်တွင် Jacquard အထည်ပေါင်း 11000 ကို အသုံးပြုခဲ့သည်။

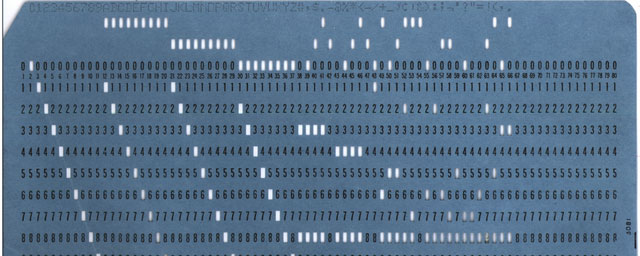
Punched cards များကို 1800 နှောင်းပိုင်းတွင် တီထွင်ခဲ့ပြီး ကြေးနန်းမှ အော်တိုစန္ဒယားအထိ အသုံးပြုမှုများစွာကို တွေ့ရှိခဲ့သည်။ စက်ပိုင်းဆိုင်ရာ ထိန်းချုပ်မှုကို အစောပိုင်းကတ်များဖြင့် ဆုံးဖြတ်ခဲ့သော်လည်း၊ အမေရိကန် တီထွင်သူ Herman Hollerith သည် ဂိမ်း၏ စည်းမျဉ်းများကို ပြောင်းလဲစေသည့် လျှပ်စစ်စက်မှုဆိုင်ရာ ကတ်ပြားကို ဖန်တီးခဲ့သည်။ သူသည် US Census Bureau အတွက် အလုပ်လုပ်နေချိန် 1889 တွင် မူပိုင်ခွင့်တင်ခဲ့သည်။
Herman Hollerith သည် 1896 ခုနှစ်တွင် tabulator ကုမ္ပဏီကို တည်ထောင်ခဲ့ပြီး 1924 ခုနှစ်တွင် IBM ကို တည်ထောင်ရန် အခြားကုမ္ပဏီလေးခုနှင့် ပေါင်းစည်းခဲ့သည်။ 20 ရာစု၏ ဒုတိယနှစ်ဝက်တွင် Punched cards များကို ကွန်ပျူတာများနှင့် ဂဏန်းထိန်းချုပ်ရေးစက်များ၏ အချက်အလက်ထည့်သွင်းခြင်းနှင့် သိမ်းဆည်းခြင်းအတွက် ပထမဆုံးအသုံးပြုခဲ့သည်။ မူရင်းဖော်မတ်တွင် အပေါက်ငါးတန်းရှိပြီး နောက်ဆက်တွဲဗားရှင်းများတွင် ခြောက်တန်း၊ ခုနစ်တန်း၊ ရှစ်တန်း သို့မဟုတ် ထို့ထက်ပိုသော အတန်းများရှိသည်။
ဆာဗိုယန္တရား
Servo ယန္တရားသည် စက် သို့မဟုတ် ယန္တရား၏ စွမ်းဆောင်ရည်ကို ပြုပြင်ရန် error inductive feedback ကို အသုံးပြုသည့် အလိုအလျောက် စက်ပစ္စည်းတစ်ခုဖြစ်သည်။ အချို့ကိစ္စများတွင်၊ servo သည် ပါဝါအလွန်နိမ့်သော စက်ပစ္စည်းများမှ ပါဝါမြင့်မားသော စက်ပစ္စည်းများကို ထိန်းချုပ်နိုင်စေပါသည်။ ဆာဗိုယန္တရားသည် ထိန်းချုပ်ထားသော ကိရိယာ၊ အမိန့်ပေးသည့် အခြားကိရိယာ၊ အမှားအယွင်း ထောက်လှမ်းသည့် တူရိယာ၊ အမှားအချက်ပြ အသံချဲ့စက်နှင့် အမှားများကို ပြင်ပေးသည့် ကိရိယာ (ဆာဗိုမော်တာ) တို့ဖြင့် ဖွဲ့စည်းထားသည်။ Servo စနစ်များကို အများအားဖြင့် အနေအထားနှင့် အမြန်နှုန်းကဲ့သို့သော ကိန်းရှင်များကို ထိန်းချုပ်ရန် အသုံးပြုကြပြီး အသုံးအများဆုံးမှာ လျှပ်စစ်၊ နယူးမက်စ် သို့မဟုတ် ဟိုက်ဒရောလစ်တို့ဖြစ်သည်။
ပထမဆုံးလျှပ်စစ်ဆာဗေးယန္တရားအား ၁၈၉၆ ခုနှစ်တွင်ဗြိတိန်တွင် H. ပြက္ခဒိန်မှစတင်တည်ထောင်ခဲ့သည်။ ၁၉၄၀ တွင် MIT သည်လျှပ်စစ်အင်ဂျင်နီယာဌာန၏တိုးမြှင့်အာရုံစိုက်မှုမှအစပြုသောအထူးဆားဗိုယန္တရားဓာတ်ခွဲခန်းကိုဖန်တီးခဲ့သည်။ CNC machining တွင်၊ အလိုအလျောက်စက်ယန္တရားလုပ်ငန်းစဉ်အတွက်လိုအပ်သောသည်းခံမှုတိကျမှုကိုရရှိရန် servo စနစ်သည် အလွန်အရေးကြီးပါသည်။
အလိုအလျောက် ပရိုဂရမ်းမင်းတူးလ် (APT)
အလိုအလျောက် ပရိုဂရမ်းမင်းတူးလ် (APT) ကို 1956 ခုနှစ်တွင် Massachusetts Institute of Technology of Massachusetts Institute of servo mechanism တွင် မွေးဖွားခဲ့သည်။ ၎င်းသည် ကွန်ပြူတာ အပလီကေးရှင်းအဖွဲ့၏ ဖန်တီးမှုအောင်မြင်မှုတစ်ခုဖြစ်သည်။ ၎င်းသည် CNC စက်ကိရိယာများအတွက် ညွှန်ကြားချက်များထုတ်လုပ်ရန် အထူးအသုံးပြုရလွယ်ကူသော အဆင့်မြင့်ပရိုဂရမ်းမင်းဘာသာစကားတစ်ခုဖြစ်သည်။ မူရင်းဗားရှင်းသည် FORTRAN ထက်စောသော်လည်း နောက်ပိုင်းဗားရှင်းများကို Fortran ဖြင့် ပြန်လည်ရေးသားခဲ့သည်။
Apt သည် ကမ္ဘာ့ပထမဆုံး NC စက်ဖြစ်သည့် MIT ၏ ပထမဆုံး NC စက်နှင့် အလုပ်လုပ်ရန် ဖန်တီးထားသော ဘာသာစကားတစ်ခုဖြစ်သည်။ ထို့နောက် ၎င်းသည် ကွန်ပျူတာ ထိန်းချုပ်စက်ကိရိယာ ပရိုဂရမ်ရေးဆွဲခြင်း၏ စံနှုန်းဖြစ်လာခဲ့ပြီး ၁၉၇၀ ခုနှစ်များတွင် တွင်ကျယ်စွာ အသုံးပြုခဲ့သည်။ နောက်ပိုင်းတွင် လေတပ်မှ ကမကထပြု၍ အရပ်ဘက်ကဏ္ဍကို ဖွင့်လှစ်ပေးခဲ့သည်။
Douglas T. Ross သည် ကွန်ပြူတာ အပလီကေးရှင်းအဖွဲ့၏ အကြီးအကဲဖြစ်ပြီး apt of the father ဟုခေါ်သည်။ နောက်ပိုင်းတွင် သူသည် computer aided design (CAD) ဟူသော အသုံးအနှုန်းကို တီထွင်ခဲ့သည်။
ပဋိသန္ဓေ ကိန်းဂဏာန်း
CNC စက်ကိရိယာများ မပေါ်ပေါက်မီ ပထမအချက်မှာ CNC စက်ကိရိယာများ နှင့် ပထမဆုံး CNC စက်ကိရိယာများ ဖွံ့ဖြိုးတိုးတက်ရေးဖြစ်သည်။ သမိုင်းဆိုင်ရာအသေးစိတ်ဖော်ပြချက်များတွင် မတူညီသောကွဲပြားမှုများအချို့ရှိသော်လည်း၊ ပထမဆုံး CNC စက်ကိရိယာသည် စစ်တပ်ရင်ဆိုင်နေရသော သီးခြားထုတ်လုပ်ရေးစိန်ခေါ်မှုများကို တုံ့ပြန်ရုံသာမက punch card စနစ်၏ သဘာဝအတိုင်း ဖွံ့ဖြိုးတိုးတက်မှုလည်းဖြစ်သည်။
"ဒစ်ဂျစ်တယ်ထိန်းချုပ်မှုသည် ဒုတိယစက်မှုတော်လှန်ရေး၏အစနှင့် စက်များနှင့်စက်မှုလုပ်ငန်းများကို ထိန်းချုပ်မှုမတိကျသောမူကြမ်းများမှ တိကျသောအရာများဆီသို့ ပြောင်းလဲသွားမည့် သိပ္ပံခေတ်သို့ရောက်ရှိလာခြင်းဖြစ်သည်" - ကုန်ထုတ်အင်ဂျင်နီယာများအသင်း။
အမေရိကန် တီထွင်သူ John T. Parsons (1913 – 2007) သည် ကိန်းဂဏာန်းထိန်းချုပ်မှု၏ ဖခင်အဖြစ် ကျယ်ကျယ်ပြန့်ပြန့် မှတ်ယူကြသည်။ သူသည် လေယာဉ်အင်ဂျင်နီယာ Frank L. stulen ၏အကူအညီဖြင့် ကိန်းဂဏာန်းထိန်းချုပ်မှုနည်းပညာကို စိတ်ကူးနှင့်အကောင်အထည်ဖော်ခဲ့သည်။ မစ်ရှီဂန်ရှိ ထုတ်လုပ်သူ၏သားအဖြစ်၊ Parsons သည် အသက် 14 နှစ်တွင် သူ့ဖခင်၏စက်ရုံတွင် တပ်ဆင်သူအဖြစ် စတင်လုပ်ကိုင်ခဲ့သည်။ နောက်ပိုင်းတွင် မိသားစုစီးပွားရေး Parsons ထုတ်လုပ်ရေးကုမ္ပဏီလက်အောက်ရှိ ကုန်ထုတ်စက်ရုံအများအပြားကို ပိုင်ဆိုင်ပြီး လုပ်ကိုင်ခဲ့သည်။
Parsons သည် ပထမဆုံး NC မူပိုင်ခွင့်ရှိပြီး ကိန်းဂဏာန်းထိန်းချုပ်မှုနယ်ပယ်တွင် ၎င်း၏ရှေ့ဆောင်လုပ်ငန်းအတွက် ကျော်ကြားသော အမျိုးသားတီထွင်သူများခန်းမတွင် ရွေးချယ်ခံခဲ့ရသည်။ Parsons တွင် စုစုပေါင်း မူပိုင်ခွင့် 15 ခုရှိပြီး အခြား 35 ခုကို ၎င်း၏လုပ်ငန်းအတွက် ခွင့်ပြုပေးထားသည်။ ကုန်ထုတ်လုပ်မှု အင်ဂျင်နီယာများ လူ့အဖွဲ့အစည်းသည် ၂၀၀၁ ခုနှစ်တွင် Parsons နှင့် တွေ့ဆုံမေးမြန်းခဲ့ပြီး သူ၏ ဇာတ်လမ်းကို လူတိုင်းသိစေရန် သူ့ရှုထောင့်မှ ရှုထောင့်မှ ကြည့်ခဲ့ပါသည်။
အစောပိုင်း NC အချိန်ဇယား
၁၉၄၂-John T. Parsons ကို Sikorsky Aircraft မှ ရဟတ်ယာဉ် ရဟတ်ဓါးများ ထုတ်လုပ်ရန် စာချုပ်ချုပ်ဆိုခဲ့သည်။
၁၉၄၄-တောင်ပံ အလင်းတန်း၏ ဒီဇိုင်း ချို့ယွင်းမှုကြောင့် ၎င်းတို့ ထုတ်လုပ်သော ပထမ ဓါးသွား ၁၈ ခုအနက် တစ်ခု ပျက်ကွက်ခဲ့ပြီး လေယာဉ်မှူး သေဆုံးခဲ့သည်။ Parsons ၏ စိတ်ကူးမှာ တပ်ဆင်အား တွယ်ကပ်ရန် ကော်နှင့် ဝက်အူများကို အစားထိုးရန် ရဟတ်ဓါးကို သတ္တုဖြင့် ထိုးဖောက်ရန် ဖြစ်သည်။
၁၉၄၆-လူတို့သည် ထိုအချိန်က အခြေအနေများအတွက် ကြီးမားပြီး ရှုပ်ထွေးသော စိန်ခေါ်မှုတစ်ခုဖြစ်သည့် ဓါးများကို တိကျစွာထုတ်လုပ်ရန် ထုတ်လုပ်မှုကိရိယာတစ်ခုကို ဖန်တီးလိုခဲ့ကြသည်။ ထို့ကြောင့် Parsons သည် လေယာဉ်အင်ဂျင်နီယာ Frank stulen ကို ငှားရမ်းပြီး အခြားလူ သုံးဦးနှင့်အတူ အင်ဂျင်နီယာအဖွဲ့ကို ဖွဲ့စည်းခဲ့သည်။ Stulen သည် ဓါးပေါ်ရှိ ဖိစီးမှုအဆင့်ကို ဆုံးဖြတ်ရန် IBM Punch Card များကို အသုံးပြုရန် စိတ်ကူးထားပြီး ပရောဂျက်အတွက် IBM စက် ခုနစ်လုံးကို ငှားရမ်းခဲ့သည်။
1948 ခုနှစ်တွင် အလိုအလျောက်စက်ကိရိယာများ၏ ရွေ့လျားမှုအစီအစဥ်ကို လွယ်ကူစွာပြောင်းလဲပစ်ရန် ပန်းတိုင်ကို ပုံသေရွေ့လျားမှုအစီအစဥ်ကို သတ်မှတ်ရုံဖြင့် နှိုင်းယှဉ်ကာ အဓိကနည်းလမ်းနှစ်ခုဖြင့် အောင်မြင်ခဲ့ပြီး- ခြေရာခံထိန်းချုပ်မှုနှင့် ဒစ်ဂျစ်တယ်ထိန်းချုပ်မှုတို့ကို အဓိကနည်းလမ်းနှစ်ခုဖြင့် ဆောင်ရွက်လျက်ရှိသည်။ ကျွန်ုပ်တို့မြင်နိုင်သည်အတိုင်း၊ ပထမတစ်ခုသည် အရာဝတ္ထု၏ရုပ်ပိုင်းဆိုင်ရာပုံစံတစ်ခုပြုလုပ်ရန် လိုအပ်သည် (သို့မဟုတ် အနည်းဆုံး စင်စင်နာတီကေဘယ်ကြိုးချောင်းရေအားလျှပ်စစ်ဖုန်းကဲ့သို့) ပြီးပြည့်စုံသောပုံဆွဲရန် လိုအပ်သည်။ ဒုတိယအချက်မှာ အရာဝတ္ထု သို့မဟုတ် အစိတ်အပိုင်း၏ ပုံသဏ္ဌာန်ကို ပြီးမြောက်ရန်မဟုတ်ဘဲ ၎င်းကို စိတ္တဇဖြစ်စေရန်သာဖြစ်သည်- သင်္ချာမော်ဒယ်များနှင့် စက်ညွှန်ကြားချက်များ။
၁၉၄၉-အမေရိကန် လေတပ်သည် အလွန်တိကျသော တောင်ပံဖွဲ့စည်းပုံ၏ အကူအညီ လိုအပ်ပါသည်။ Parsons သည် ၎င်း၏ CNC စက်ကို ရောင်းချပြီး ၎င်းကို အမှန်တကယ်ဖြစ်လာစေရန် ဒေါ်လာ 200000 တန်ကြေးရှိ စာချုပ်ကို ရရှိခဲ့သည်။
၁၉၄၉-Parsons နှင့် stulen တို့သည် စက်များကို တီထွင်ရန်အတွက် Snyder machine & tool Corp. နှင့် ပူးပေါင်းလုပ်ဆောင်နေပြီး စက်များကို တိကျစွာအလုပ်လုပ်စေရန် ဆာဗိုမော်တာများ လိုအပ်ကြောင်း သိရှိနားလည်ခဲ့သည်။ Parsons သည် “card-a-matic ကြိတ်စက်” ၏ ဆားဗိုစနစ်အား Massachusetts Institute of Technology ၏ ဆားဗိုယန္တရားဓာတ်ခွဲခန်းတွင် ပြုလုပ်ခဲ့သည်။
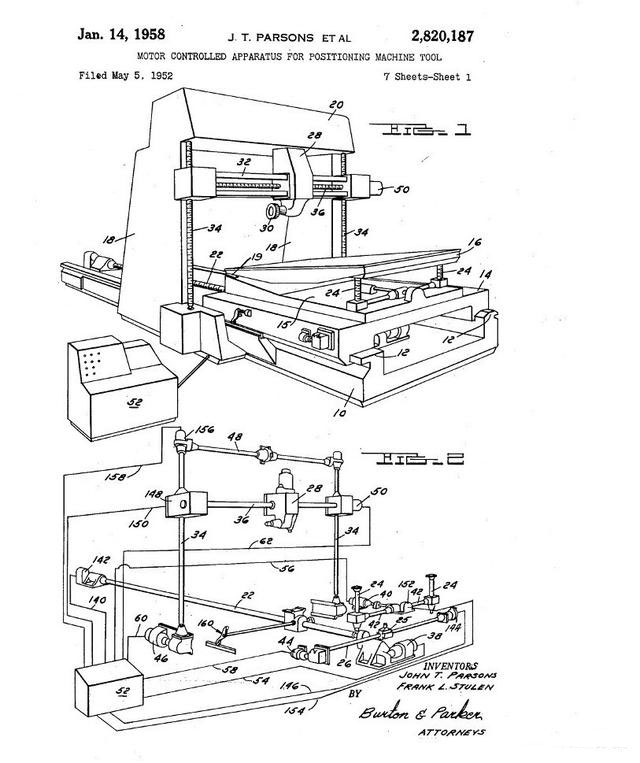
1952 (မေလ) - Parsons သည် "စက်တည်နေရာပြစက်ကိရိယာများအတွက် မော်တာထိန်းချုပ်ကိရိယာ" အတွက် မူပိုင်ခွင့်လျှောက်ထားခဲ့သည်။ ၁၉၅၈ တွင် မူပိုင်ခွင့်ကို ပေးခဲ့သည်။
1952 (သြဂုတ်လ)။တုံ့ပြန်မှုအနေဖြင့် MIT သည် "ဂဏန်းထိန်းချုပ်မှုဆာဗိုစနစ်" အတွက် မူပိုင်ခွင့်လျှောက်ထားခဲ့သည်။
ဒုတိယကမ္ဘာစစ်ပြီးနောက်၊ အမေရိကန်လေတပ်သည် ၎င်း၏တည်ထောင်သူ John Parsons မှပြုလုပ်သော NC စက်ပိုင်းဆိုင်ရာဆန်းသစ်တီထွင်မှုကို ပိုမိုဖွံ့ဖြိုးတိုးတက်စေရန် Parsons နှင့် စာချုပ်အများအပြား ချုပ်ဆိုခဲ့သည်။ Parsons သည် MIT ၏ဆားဗိုယန္တရားဓာတ်ခွဲခန်းတွင်လုပ်ဆောင်နေသည့်စမ်းသပ်မှုများကိုစိတ်ဝင်စားခဲ့ပြီး MIT သည် အလိုအလျောက်ထိန်းချုပ်မှုဆိုင်ရာကျွမ်းကျင်မှုပေးရန် 1949 ခုနှစ်တွင်ပရောဂျက်ခွဲသွင်းသူဖြစ်လာရန်အဆိုပြုခဲ့သည်။ လာမည့် 10 နှစ်တွင် MIT သည် servo ဓာတ်ခွဲခန်း၏ "ဝင်ရိုးသုံးဝင်ရိုးစဉ်ဆက်မပြတ်လမ်းကြောင်းထိန်းချုပ်မှု" ၏အမြင်သည် Parsons ၏ "ဖြတ်တောက်ခြင်းနေရာချထားခြင်း" ၏မူလအယူအဆကိုအစားထိုးသောကြောင့် MIT သည်စီမံကိန်းတစ်ခုလုံးကိုထိန်းချုပ်နိုင်ခဲ့သည်။ ပြဿနာများသည် နည်းပညာကို အမြဲပုံဖော်ထားသော်လည်း သမိုင်းပညာရှင် David Noble မှ မှတ်တမ်းတင်ထားသော ဤအထူးဇာတ်လမ်းသည် နည်းပညာသမိုင်းတွင် အရေးကြီးသော မှတ်တိုင်တစ်ခုဖြစ်လာသည်။
၁၉၅၂-MIT သည် ရှုပ်ထွေးပြီး စျေးကြီးသော 7-rail perforated belt system (လေဟာနယ်ပြွန် 250၊ 175 relays၊ ရေခဲသေတ္တာအရွယ်အစားရှိ ဗီဒိုငါးလုံးတွင်) ကို သရုပ်ပြခဲ့သည်။
1952 ခုနှစ်တွင် MIT ၏ မူရင်း CNC ကြိတ်စက်သည် ပြုပြင်ထားသော 3-ဝင်ရိုး Cincinnati ကြိတ်စက်ကုမ္ပဏီဖြစ်သည့် Hydro Tel ဖြစ်သည်။
1952 ခုနှစ် စက်တင်ဘာလထုတ် Scientific American ဂျာနယ်တွင် လူသားတို့၏ အနာဂတ်ကို ထိထိရောက်ရောက် ပုံဖော်ပေးမည့် သိပ္ပံနှင့် နည်းပညာဆိုင်ရာ တော်လှန်ရေးကို ကိုယ်စားပြုသည့် “ကိုယ်ပိုင်ထိန်းညှိစက်” နှင့်ပတ်သက်သည့် ဆောင်းပါး ခုနစ်ပုဒ်ရှိသည်။
၁၉၅၅-Concord ထိန်းချုပ်မှုများ (MIT ၏မူရင်းအဖွဲ့မှအဖွဲ့ဝင်များဖွဲ့စည်းထားသည့်) သည် GE မှတီထွင်ထားသည့်တိပ်ဖတ်စက်ဖြင့် MIT NC စက်များတွင်ဖောက်ထားသောတိပ်ကိုအစားထိုးသည့် numericard ကိုဖန်တီးခဲ့သည်။
တိပ်သိမ်းဆည်းခြင်း။
၁၉၅၈-Parsons သည် US မူပိုင်ခွင့် 2820187 ကို ရယူခဲ့ပြီး Bendix အား သီးသန့်လိုင်စင်ကို ရောင်းချခဲ့သည်။ IBM၊ Fujitsu နှင့် General Electric တို့သည် ၎င်းတို့၏ ကိုယ်ပိုင်စက်များကို စတင်တီထွင်ပြီးနောက် လိုင်စင်ခွဲများ ရရှိခဲ့ကြသည်။
၁၉၅၈-MIT သည် လက်ရှိ NC စက်သည် အချိန်ကုန် သက်သာသော်လည်း စက်ရုံအလုပ်ရုံမှ အလုပ်သမားများအား ခါးပတ်ဖောက်ထားသည့် သူများထံ လွှဲပြောင်းပေးထားကြောင်း NC ဘောဂဗေဒဆိုင်ရာ အစီရင်ခံစာတစ်စောင် ထုတ်ပြန်ခဲ့သည်။
တင်ချိန်- ဇူလိုင် ၁၉-၂၀၂၂